赛帝交通智能--专注散热

扫一扫咨询
散热片,散热器,散热模组的专业生产厂家...
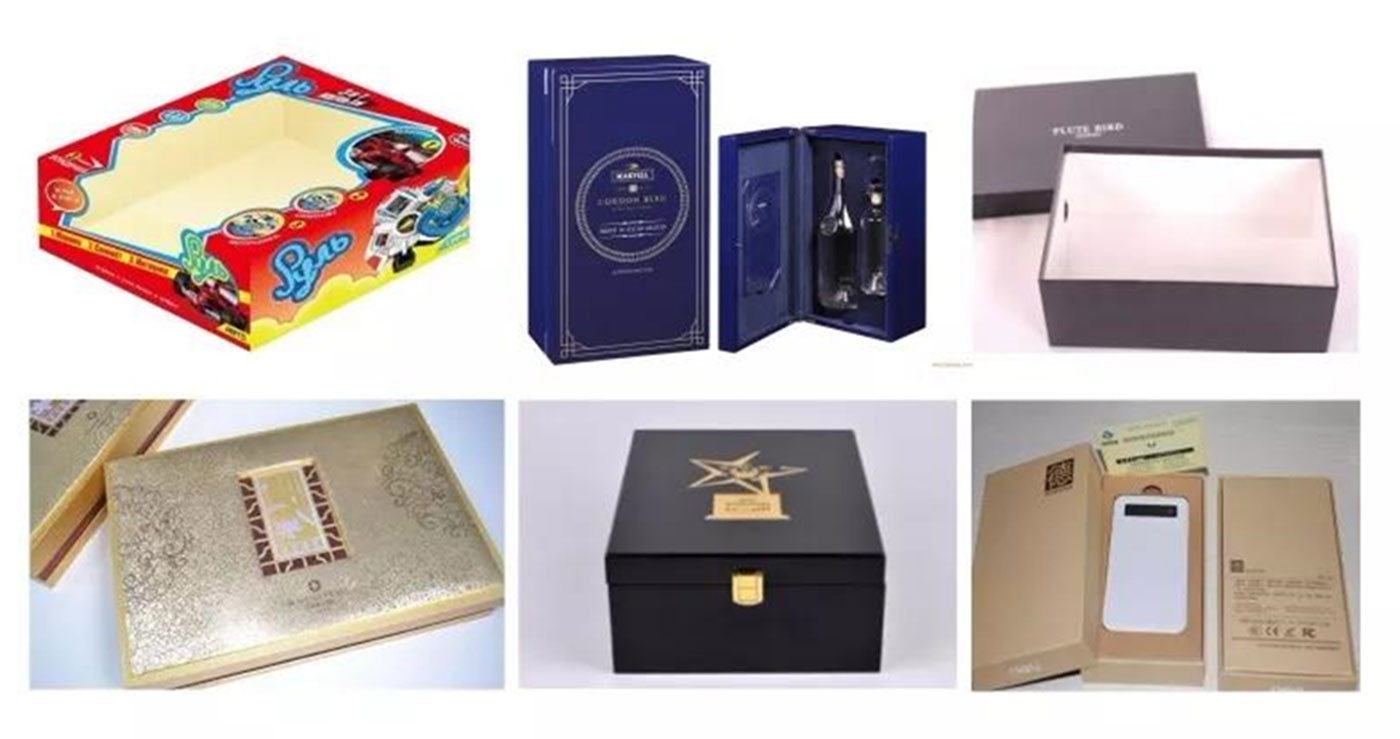
天地盖贴合,即将外包装面纸与内结构灰纸盒进行精确的对位贴合,是各类纸盒包装盒制作工序中对质量影响重大的一环。
人工贴合对位精度低、速度慢、胶水不环保。
而深圳推出的天地盖贴合系统,通过引入工业、智能相机,基于运动控制、机器视觉技术,可以实现高速高精度的自动化生产,提质增效降低成本,相比传统工艺具有显著的优势。
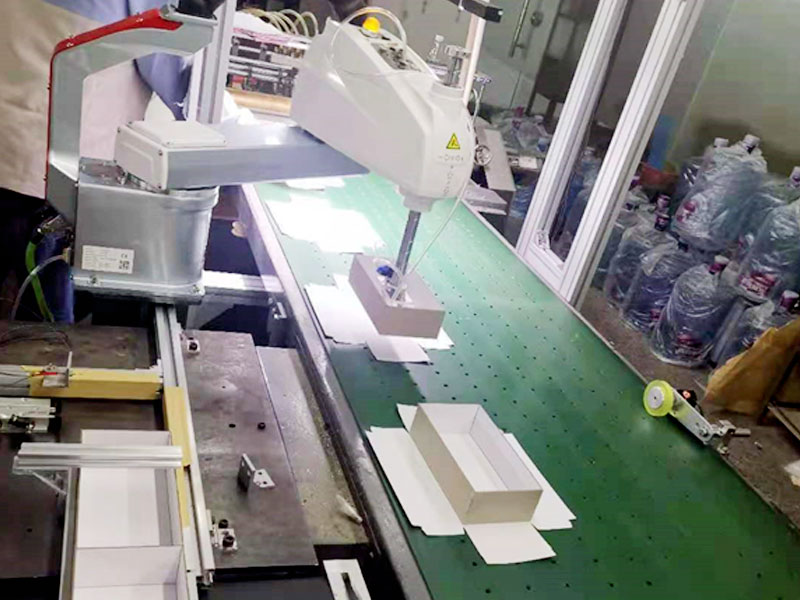
该系统主要硬件有:Scara机器人、智能相机,以及配套的控制器、示教盒、光源、编码器等。软件有:集成于控制器的机器人控制系统和视觉软件。可以根据实际情况,搭配不同的外围设备:上料机构、抓放工具、传送带、面料机、成型机等等。
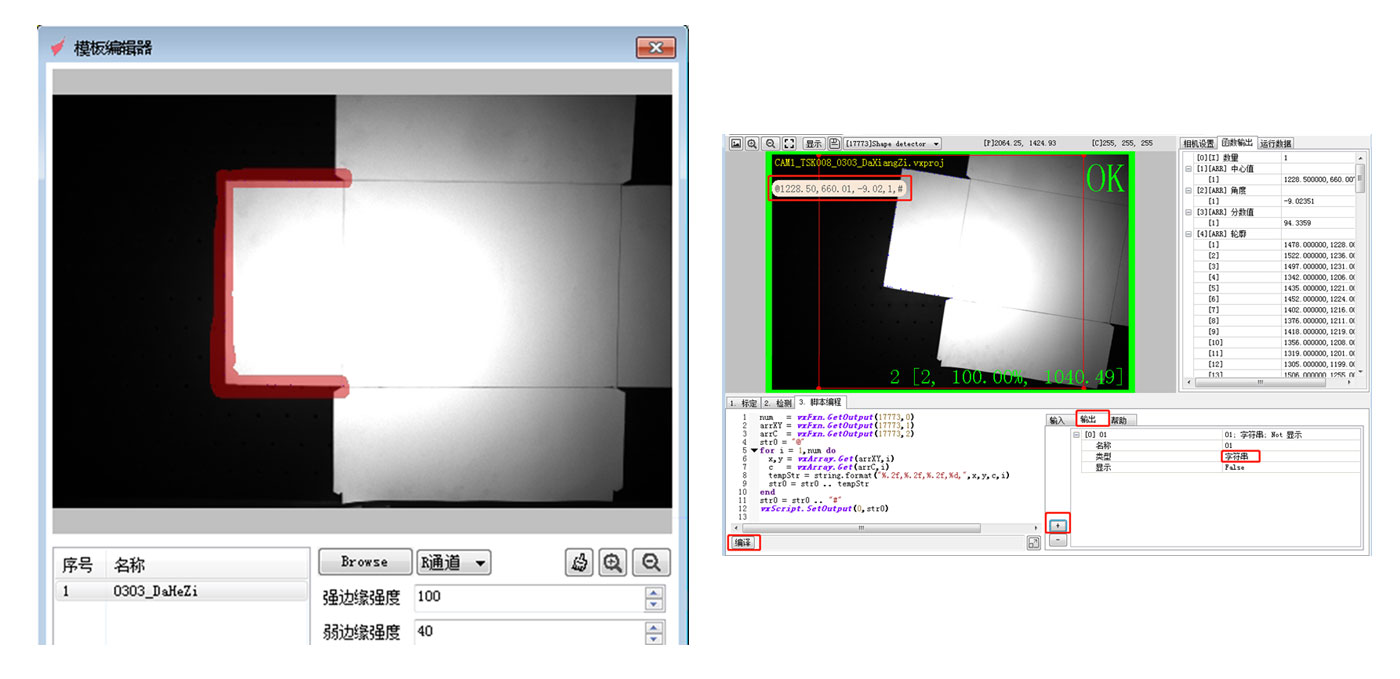
典型配置中采用单相机识别,镜头少、光源少、机架安装少、成本低、调试工作量极简。可以任意选择要识别的局部轮廓特征,不拘泥于完整面纸图像。
典型配置中传送带始终保持匀速运动状态,拍照检测环节、贴合环节都无须起停传送带,在保证精度的同时提高了整体的节拍效率。
基于自主研发的机器人控制系统,可以随实际应用情况柔性调整工艺,除了常规的点位、路径、速度、抓放时间调整,还可以实现一抓多放、多机器人同时控制、后续成型工序自动跟随上料等其他柔性生产环节。
整套系统对生产环境要求不高,无须改造、可适应老旧外围设备,对机械安装精度要求不高,可适应一定程度的误差。软件界面自主研发、全中文,操作简单调试方便快捷,经培训后,可在2小时内完成安装调机,在30分钟内完成更换产品。
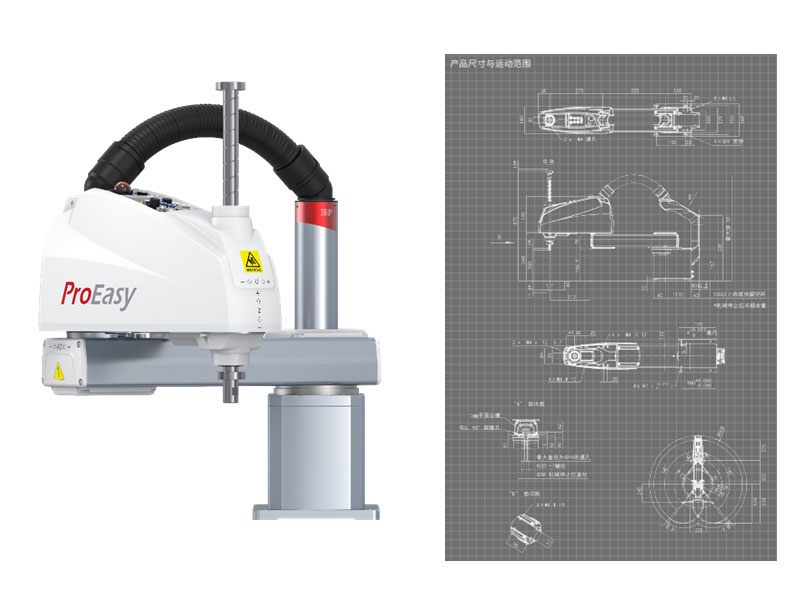
| 工业机器人 | Scara机器人,臂展600mm,高度行程200mm,负载6kg,重复定位精度0.01mm,速度3000mm/s | |||
| 工业相机 | 海康500万像素动态相机,工作距离600mm,视野范围600mm x 500mm,识别精度±0.15mm | |||
| 工作方式 | 传送带匀速运动、相机移动拍照、机器人移动贴合 | |||
| 产品尺寸 | 小型:长40mm~300mm宽40mm~180mm高40mm~80mm | 大型:长300mm~800mm宽180mm~350mm高80mm~140mm | ||
| 工作节拍 | 25~30个每分钟 | 15~20个每分钟 | ||
| 负载 | 2kg以内 | 传送带速度 | 50mm/s~250mm/s | |
| 定位精度 | ±0.25mm | 定位角度 | ±0.1度 | |
| 初次调机时间 | 2~4小时 | 新产品更换时间 | 15~30分钟 | |
广泛应用于礼品盒、食品盒、手机盒、鞋盒、首饰盒、玩具盒、化妆品盒、烟酒盒等。