
赛帝交通智能--专注散热

扫一扫咨询
散热片,散热器,散热模组的专业生产厂家...

我们可以通过电话帮您找到想要的商品
| 传统运动控制卡 | RtMotion | |
| 灵活性 | 运动控制函数封装,不公开。 无法定制化开发,只适配固定机型。 |
RtMotion可定制函数, 并且提供高级语言接口编程,二次开发简便。 |
| 可扩展性 | 扩展轴只能添加运动控制卡,成本增加。 | RtMotion添加轴只需硬件串接,软件扫描配置参数。不改变原有结构。 |
| 可维护性 | 运动控制卡编程接口单一,C++编程掌握较难,同时硬件拔插易造成接触不良。 | RtMotion拥有多种高级编程语言接口可供选择, 同时基于RtMotion的RIMC完成编程与稳定测试 后,无需维护。 |
| PLC功能 | 运动控制卡不具备,需另购PLC。 | RtMotion只需添加配置IO口即可。 |
| 成本 | 常规的卡一次只能带4~6个轴, 同时计算机的PCI插槽有限。 |
RtMotion可带96个伺服电机,48个步进电机。 |
多接口:RtMotion通用库支持操控96个伺服电机与48个步进电机(如有更高需求,可定制化开发);同时配套的AG8亚国亚洲IO板卡支持40组数字输入,32组数字输出和6个步进电机,且支持扩展。
适用性:RtMotion无需PCI插槽及板卡,运动控制程序和HMI程序可集成在同一台PC机上,结构简单,使用方便。
RtMotion运动控制库提供上位开发接口函数,可支持C#/C++编程。基于CODESYS RTE程序在工控机中运行。通过共享内存空间进行运动控制。具体结构如下图2.1所示:
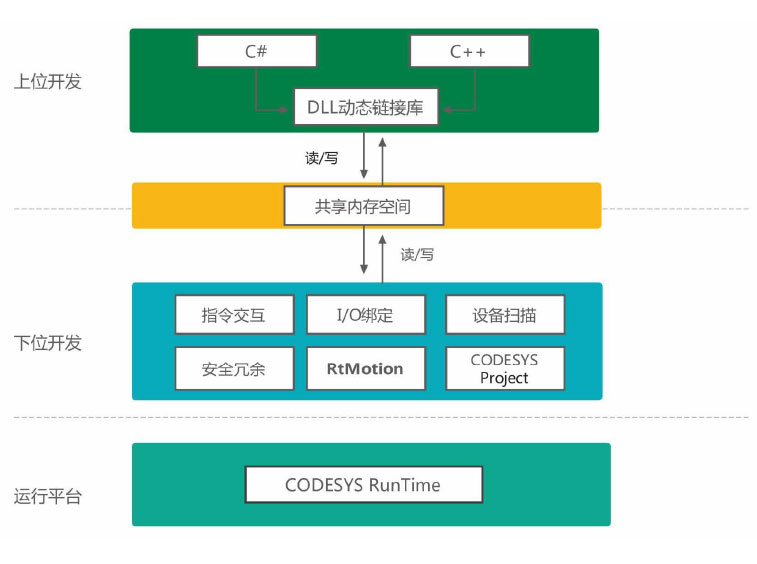
图2.1 RtMotion运动控制库结构原理
通过共享内存进行数据交换和指令交互。完成软运动控制。
使用RtMotion接口完成C#/C++的编程,同时搭建好RtMotion运行环境。
安装RTE程序,搭建工控机运行环境。将项目下载到工控机。
RtMotion运动控制库中,内置了路径规划算法,上位接口传入指定类型的运动参数,算法会根据参数完成路径规划,从而完成运动控制。
目前已研发:DELTA机器人运动控制库,SCARA机器人运动控制库,六轴机器人运动控制库,软运动控制库。并已经在市场上成熟运用。如图2.2所示:软运动控制库函数封装示例。
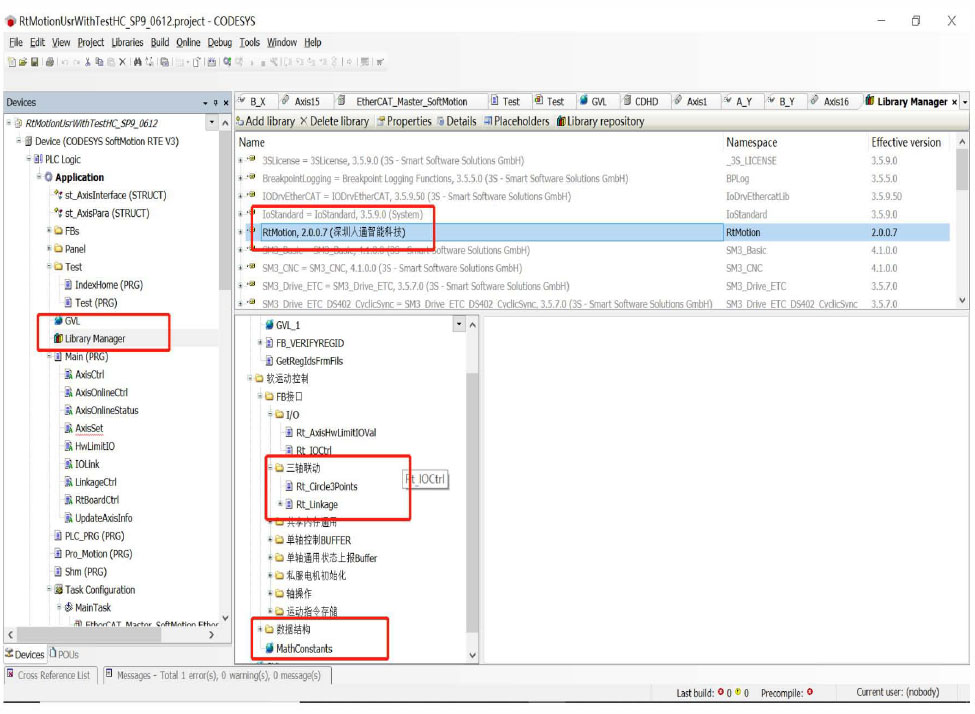
图2.2软运动控制库函数封装示例
 上位开发接口
上位开发接口
RtMotion提供C++与C#版本的接口函数。可使用计算机高级语言C#,C++等多种高级语言进行上位编程,如下图2.3所示:C++接口函数的部分指令截图。
第一章指令列表表1-1指令列表
| 基本指令 | |
| Rt_ConnectPlc | 创建共享内存连接底层PLC |
| Rt_DisConnectP1c | 断开连接,释放资源 |
| Rt_GetP1cHeartbeat | 获取底层PLC心跳值 |
| Rt_SetHeartbeatToP1c | 设置应用层心跳值到底层 |
| 基输入输出指令(数字输入和数字输出) | |
| Rt_OutIoCtr1 | 控制输出 |
| Rt_OutIoCtr1AutoRevrse | 控制输出后自动翻转 |
| Rt_CompareLinear | 等距离比较输出 |
| Rt_CompareTimer | 等时间比较输出 |
| Rt_CompareData | 离散位置比较输出 |
| Rt_CompareStop | 取消比较输出 |
| Rt_GetOutIoVa1 | 获取输出状态 |
| Rt_GetInIoVa1 | 获取输入状态 |
| 伺服轴单轴指令 | |
| Rt_SetAxisIdToStatusBuffe r | 给状态buffer中设置需要查询的轴 |
| Rt_GetAxisStatus | 获取轴的位置速度等信息 |
| Rt_GetStartStatus | 获取轴的启动状态 |
| Rt_GetAxisMoveSts | 获取轴的运动状态 |
| Rt_GetAxisSts | 获取轴的状态(表2-1) |
| Rt_SetAxisMcs | 设置轴的坐标位置 |
| Rt_SetAxisSoftLimit | 设置轴的软限位 |
| Rt_Canc1eAxisSoftLimit | 取消轴的软限位 |
| Rt_EnAxisHwLimit | 使能轴的硬限位 |
| Rt_Canc1eAxisHwLimit | 取消轴的硬限位 |
| Rt_Enab1e | 轴使能 |
C++函数部分指令
RtMotion函数接口优点

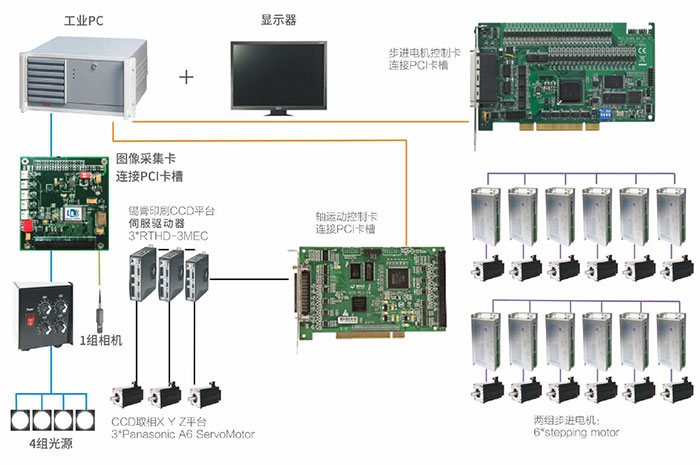
图3.1 运动控制卡应用现状
一台设备需要插入运动控制卡,图像处理卡等多种类型的PCI卡。接线、编程较复杂。需要不同的工种配合才能完成,在人力、时间成本上花费较多。
运动控制卡修改困难,函数为一卡一编制,更换运动控制卡需要重新编写或载入编程函数。操作较麻烦。

基于PC架构的控制解决方案,将人机交互软件、视觉处理软件、工控下位机软件、CODESYS平台的系统集成在RIMC中,以适配不同的外部设备。
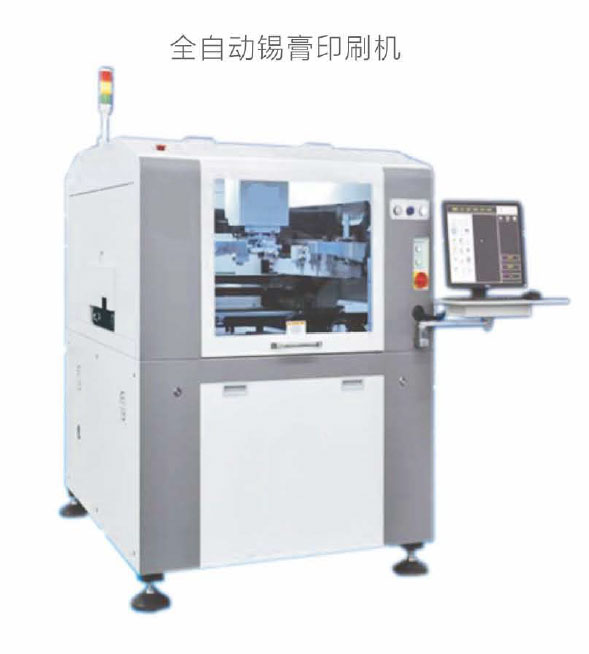
极简式操作,只需三步即可开始锡膏印刷。
基于上位集成的视觉处理,拥有更快的图像处理功能。
功能更强大,控制更加灵活,运动过程中随叫随停,停止后又继续跑完,加入飞拍点等,可以定制个性化的功能。
消除了不同种类的运动控制卡之间的协作,由RIMC统一集成。提升工作效率。
采用RtMotion库进行路径规划改良,有效的提高了速度与精度。
速度提升60%-70%。机器带视觉的情况下匀速贴片速度从4000cph提升到7000cph。最高达到7200cph,稳定在6800cph。增加全闭环功能。
贴片精度控制在0.02mm,行业精度标准0.05mm,T4产品原有精度在0.045mm-0.050mm之间。通过算法及库函数改进,成功将精度提升。